Zymplectic project
Spherical pendulum (Euler angles)
The Hamiltonian of the spherical pendulum is derived. An implementation is shown and various graphical results are presented.
Available with Zymplectic v.0.3.0 (revised from v.0.2.6)
The spherical pendulum is a simple three-dimensional dynamical system.
The Hamiltonian of the spherical pendulum is derived and an implementation is shown to graphically present the the system in three dimensions.
Define first the variables
 In extension to the previous derivation assume, without loss of generality, that the platform has a non-zero mass M and the mass of the bipod is neglected. The kinetic and potential is then:
\(\displaystyle{\qquad T = \frac{1}{2}m{r^2}\left( {\dot q_2^2\sin {{\left( {q_1} \right)}^2} + \dot q_1^2} \right) + \frac{1}{2}I\dot q_2^2 }\)
\(\displaystyle{\qquad V = mgr\cos \left( {q_1} \right) }\)
The canonical momenta can be obtained from the Lagrangian:
\(\displaystyle{\qquad \frac{{\partial L}}{{{{\partial \dot q}_1}}} = {p_1} = m{{\dot q}_1}{r^2} }\)
\(\displaystyle{\qquad \frac{{\partial L}}{{{{\partial \dot q}_2}}} = {p_2} = {{\dot q}_2}\left( {I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}} \right) }\)
and are used to express the kinetic and potential energy:
\(\displaystyle{\qquad T = \frac{{p_1^2}}{{2m{r^2}}} }\)
\(\displaystyle{\qquad V = \frac{{p_2^2}}{{2\left( {I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}} \right)}} + mgr\cos \left( {{q_1}} \right) }\)
from which the Hamiltonian gradient follows:
\(\displaystyle{\qquad \frac{{\partial T}}{{\partial {p_1}}} = \frac{{{p_1}}}{{m{r^2}}} }\)
\(\displaystyle{\qquad \frac{{\partial T}}{{\partial {p_2}}} = \frac{{{p_2}}}{{I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}}} }\)
\(\displaystyle{\qquad \frac{{\partial V}}{{\partial {q_1}}} = - mr\frac{{g\sin \left( {{q_1}} \right) + 2p_2^2r\sin \left( {2{q_1}} \right)}}{{4{{\left( {I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}} \right)}^2}}} }\)
\(\displaystyle{\qquad \frac{{\partial V}}{{\partial {q_2}}} = 0 }\)
Using zero moment of inertia (zero platform mass) reduces effectively the system to the spherical pendulum derived in the first section. The code for this system is implemented as an example in Zymplectic.
In extension to the previous derivation assume, without loss of generality, that the platform has a non-zero mass M and the mass of the bipod is neglected. The kinetic and potential is then:
\(\displaystyle{\qquad T = \frac{1}{2}m{r^2}\left( {\dot q_2^2\sin {{\left( {q_1} \right)}^2} + \dot q_1^2} \right) + \frac{1}{2}I\dot q_2^2 }\)
\(\displaystyle{\qquad V = mgr\cos \left( {q_1} \right) }\)
The canonical momenta can be obtained from the Lagrangian:
\(\displaystyle{\qquad \frac{{\partial L}}{{{{\partial \dot q}_1}}} = {p_1} = m{{\dot q}_1}{r^2} }\)
\(\displaystyle{\qquad \frac{{\partial L}}{{{{\partial \dot q}_2}}} = {p_2} = {{\dot q}_2}\left( {I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}} \right) }\)
and are used to express the kinetic and potential energy:
\(\displaystyle{\qquad T = \frac{{p_1^2}}{{2m{r^2}}} }\)
\(\displaystyle{\qquad V = \frac{{p_2^2}}{{2\left( {I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}} \right)}} + mgr\cos \left( {{q_1}} \right) }\)
from which the Hamiltonian gradient follows:
\(\displaystyle{\qquad \frac{{\partial T}}{{\partial {p_1}}} = \frac{{{p_1}}}{{m{r^2}}} }\)
\(\displaystyle{\qquad \frac{{\partial T}}{{\partial {p_2}}} = \frac{{{p_2}}}{{I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}}} }\)
\(\displaystyle{\qquad \frac{{\partial V}}{{\partial {q_1}}} = - mr\frac{{g\sin \left( {{q_1}} \right) + 2p_2^2r\sin \left( {2{q_1}} \right)}}{{4{{\left( {I + m{r^2}\sin {{\left( {{q_1}} \right)}^2}} \right)}^2}}} }\)
\(\displaystyle{\qquad \frac{{\partial V}}{{\partial {q_2}}} = 0 }\)
Using zero moment of inertia (zero platform mass) reduces effectively the system to the spherical pendulum derived in the first section. The code for this system is implemented as an example in Zymplectic.
Defining the spherical pendulum
- r as the length of the pendulum from the pivot (origo) to the bob
- m as the mass of the bob
- θ is the angle between the z axis and the pendulum measured from top
- φ is the angle the pendulum measured from the positve x axis counterclockwise around the z-axis.
- g is the gravitational constant
Deriving the Hamiltonian
The Cartesian coordinates of the spherical pendulum are retrieved directly from the conventional definition of spherical coordinates. \(\displaystyle{\qquad x = r\sin \left( {q_1} \right)\cos \left( {{q_2}} \right) }\) \(\displaystyle{\qquad y = r\sin \left( {q_1} \right)\sin \left( {{q_2}} \right) }\) \(\displaystyle{\qquad z = r\cos \left( {q_1} \right) }\) although it must be assumed for numerical treatment that q2 can assign any value as opposed to the conventional definition of spherical coordinates θ ∈ [0,π]. Noting that both q1 and q2 are functions of time, the time derivatives of the Cartesian coordinates are then: \(\displaystyle{\qquad \dot x = {{\dot q}_1}r\cos \left( {q_1} \right)\cos \left( {{q_2}} \right) - {{\dot q}_2}r\sin \left( {q_1} \right)\sin \left( {{q_2}} \right) }\) \(\displaystyle{\qquad \dot y = {{\dot q}_1}r\cos \left( {q_1} \right)\sin \left( {{q_2}} \right) + {{\dot q}_2}r\sin \left( {q_1} \right)\cos \left( {{q_2}} \right) }\) \(\displaystyle{\qquad \dot z = - {{\dot q}_1}r\sin \left( {q_1} \right) }\) the kinetic and potential energy are obtained: \(\displaystyle{\qquad T = \frac{1}{2}m\left( {{{\dot x}^2} + {{\dot y}^2} + {{\dot z}^2}} \right) = \frac{1}{2}m{r^2}\left( {\dot q_2^2\sin {{\left( {q_1} \right)}^2} + \dot q_1^2} \right) }\) \(\displaystyle{\qquad V = mgz = mgr\cos \left( {q_1} \right) }\) from which the Lagrangian follows: \(\displaystyle{\qquad L = T - V = \frac{1}{2}m{r^2}\left( {\dot q_2^2\sin {{\left( {q_1} \right)}^2} + \dot q_1^2} \right) - mgr\cos \left( {q_1} \right) }\) yielding the canonical momenta: \(\displaystyle{\qquad \frac{{\partial L}}{{{{\partial \dot q}_1}}} = p_1 = m{{\dot q}_1}{r^2} }\) \(\displaystyle{\qquad \frac{{\partial L}}{{{{\partial \dot q}_2}}} = p_2 = m{{\dot q}_2}{r^2} sin(q_1)^2 }\) The Hamiltonian can now be expressed explicitly in terms of the canonical coordinates p and q: \(\displaystyle{\qquad H\left( {p,q} \right) = T + V = \frac{{p_2^2}}{{2m{r^2}\sin {{\left( {q_1} \right)}^2}}} + \frac{{p_1^2}}{{2m{r^2}}} + mgr\cos \left( {q_1} \right) }\) Note that the Hamiltonian seems nonseparable as it can not be separated into two functions T(p) and V(q). It is also worth noting that the Hamiltonian diverges at the poles q1 = 0 and q1 = π The poles should never be occupied for a spherical pendulum with non-zero rotational velocity around the z-axis. \(\displaystyle{\qquad \frac{{\partial H}}{{\partial {p_1}}} = \frac{p_1}{{m r^2}} }\) \(\displaystyle{\qquad \frac{{\partial H}}{{\partial {p_2}}} = \frac{p_2}{{m r^2 \sin {{\left( {q_1} \right)}^2}}} }\) \(\displaystyle{\qquad \frac{{\partial H}}{{\partial q_1}} = - \frac{{p_2^2\cos \left( {q_1} \right)}}{{m r^2\sin {{\left( q_1 \right)}^3}}} - mgr\sin \left( {q_1} \right) }\) \(\displaystyle{\qquad \frac{{\partial H}}{{\partial {q_2}}} = 0 }\) The last terms being zero implies that p2 must be constant. More precisely, p2 is constant because this is associated with the angular momentum of the spherical pendulum. It follows from p2 being constant that the Hamiltonian is separable: \(\displaystyle{\qquad T = \frac{{p_1^2}}{{2m{r^2}}} }\) \(\displaystyle{\qquad V = \frac{{p_2^2}}{{2m{r^2}\sin {{\left( {{q_1}} \right)}^2}}} + mgr\cos \left( {{q_1}} \right) }\) Following should be noted on the separable form:- The potential V is commonly associated with the effective potential.
- The separable form is governed by the same equations of motions when accounting for p2 being constant.
- The spherical pendulum can be simulated using only the time evolution of q1 and p1. In this case, q2 must be obtained by other means to graphically the cyclic rotation of the pendulum
Implementation
The following code simulates the spherical pendulum. The pendulum is displayed in function DrawFunc by transforming q1 and the time tau to Cartesian coordinates. The pendulum bob trajectory is displayed by function IterFunc. Disabling DrawFunc will display the angle coordinates in the phase space, and allows energy surface display as presented in results.//Copy-paste into Zymplectic or load as file to run the simulation
#include "math.h"
const double m = 1.0; //mass of the pendulum bob
const double w1 = 0.0; //initial angular velocity in relation to the latitude
const double w2 = 1.0; //initial angular velocity around z-axis
const double r = 0.5; //pendulum length
const double g = 1.0; //gravitational constant
double V(Arg) {
return p2*p2/(2*m*r*r*sin(q1)*sin(q1)) + m*g*r*cos(q1);
}
double T(Arg) {
return p1*p1/(2*m*r*r);
}
void dV(Arg) {
d1 = -p2*p2*cos(q1)/(m*r*r*sin(q1)*sin(q1)*sin(q1)) - m*g*r*sin(q1);
d2 = 0.0;
}
void dT(Arg) {
d1 = p1/(m*r*r);
d2 = p2/(m*r*r*sin(q1)*sin(q1));
}
void DrawFunc() {
double x = r*sin(obj_q[0][0])*cos(obj_q[0][1]);
double y = r*sin(obj_q[0][0])*sin(obj_q[0][1]);
double z = r*cos(obj_q[0][0]);
double GX[2] = {x,0};
double GY[2] = {z + r,r}; //depicting x,z rather than x,y
double GZ[2] = {y,0};
draw.light(2*r,r,0,1);
draw.lines(GX,GY,GZ,2);
draw.rgb(0.1,0.8,0.1,1);
draw.sphere(GX[0], GY[0], GZ[0], 0.05);
draw.rgb(0.6,0.3,0.6,1);
draw.rod(0, -0.1, 0, 0, 0, 0, r*1.2, obj_q[0][1], 32); //make platform
double c = -r*sin(obj_q[0][1]), s = r*cos(obj_q[0][1]);
draw.rod(c, 0, s, c, r, s, 0.01); //make bipod
draw.rod(-c, 0, -s, -c, r, -s, 0.01);
draw.rod(c, r, s, -c, r, -s, 0.01);
}
void IterFunc() {
double x = r*sin(obj_q[0][0])*cos(obj_q[0][1]);
double y = r*cos(obj_q[0][0]);
draw.track_add(x, y + r); //display pendulum bob trajectory
}
double _q_init[2] = {-1.5,0}; //initial latitude (undefined at the poles 0 and pi) and longitude
double _p_init[2] = {0,0};
void main() {
Z.tstep = 0.0005;
_p_init[0] = m*w1*r*r; //calculate p1 from the initial angular velocity w2
_p_init[1] = m*w2*r*r*sin(_q_init[0])*sin(_q_init[0]); //calculate p2 from the initial angular velocity w2
Z.graph3D = 1;
Z.OnDraw = DrawFunc; //draw the pendulum
Z.OnIter = IterFunc; //obtain bob trajectory
Z.track = 0;
Z.amp = 10;
Z.delay = 5;
Z.xmin = 40; Z.ymin = 40; Z.zmin = 40; Z.xmax = 0.1125; Z.ymax = 0.5; Z.zmax = 1.75; //Camera
Z.T(T,dT,0);
Z.V(V,dV,0);
}
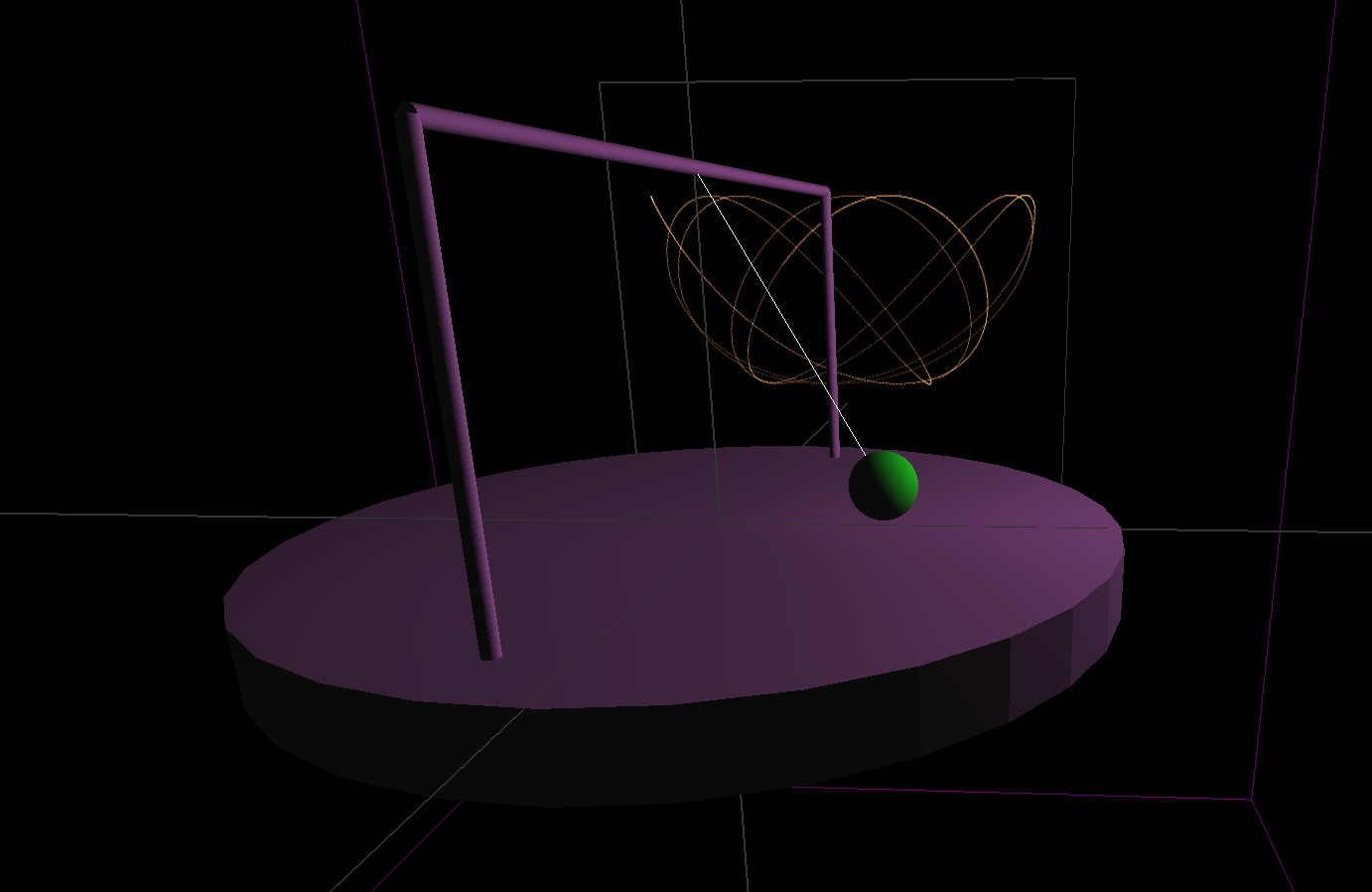
Spherical pendulum with solid platform
In the previous section, the spherical pendulum was graphically depicted as pendulum with one degree of freedom that was mounted to a massless rotating platform as illustrated in the following figure: