Zymplectic project
Spherical pendulum (stereographic projection)
The Hamiltonian of the spherical pendulum is derived using stereographic projection coordinates. An implementation is presented and the advantages and disadvantages of this approach for dynamical systems is briefly discussed.
Available with Zymplectic v.0.4.1
The Hamiltonian of the spherical pendulum is presented most often in literature using Euler angles:
\(\displaystyle{\qquad H\left( {p,q} \right) = \frac{{p_2^2}}{{2m{r^2}\sin {{\left( {q_1} \right)}^2}}} + \frac{{p_1^2}}{{2m{r^2}}} + mgr\cos \left( {q_1} \right) }\)
In the following section, the Hamiltonian of the spherical pendulum will be derived using stereographic projection coordinates (SPC) yielding the Hamiltonian:
\(\displaystyle{\qquad H\left( {p,q} \right) = \frac{{p_1^2 + p_2^2}}{{2m{{\left( {\frac{{2r}}{{q_1^2 + q_2^2 + 1}}} \right)}^2}}} + gm\left( {r - \frac{{2r}}{{q_1^2 + q_2^2 + 1}}} \right) }\)
which is numerically far superior to the acclaimed Euler angle Hamiltonian as is discussed in the last section.
 Define first the variables
Define first the variables
Defining the spherical pendulum
- r as the constant length of the pendulum from the pendulum pivot to the bob
- m as the mass of the bob
- g is the gravitational constant
Deriving the Hamiltonian
The Cartesian coordinates (x,y,z) of the pendulum bob are retrieved directly from SPC, where the canonical coordinates q1 and q2 are defined as X and Z respectively.
Implementation
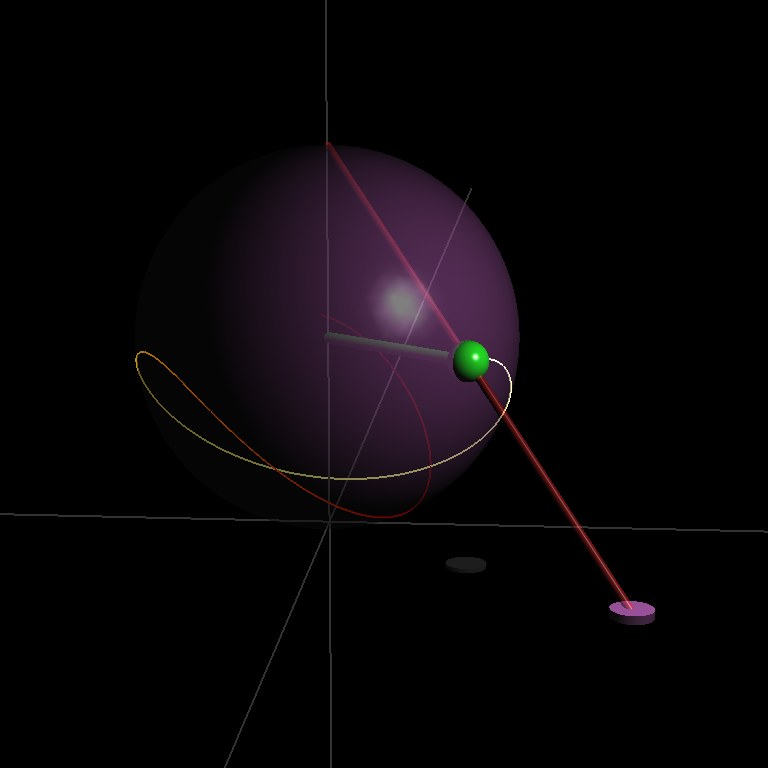
The following code simulates the spherical pendulum. The pendulum is displayed in function DrawFunc by transforming the SPC to Cartesian coordinates. The pendulum bob trajectory is likewise displayed by function IterFunc.//Copy-paste into Zymplectic or load as file to run the simulation
const double m = 1.0; //mass of the pendulum bob
const double r = 0.5; //pendulum length
const double g = 1.0; //gravitational constant
double H(Arg) {
double a = 2*r/(q1*q1 + q2*q2 + 1);
return (p1*p1 + p2*p2)/(2*m*a*a) + g*m*(r - a);
}
void dH(Arg) {
double a = 2*r/(q1*q1 + q2*q2 + 1);
double b = (p1*p1 + p2*p2)/(m*r*a) + g*m*a*a/r;
dq1 = q1*b;
dq2 = q2*b;
dp1 = p1/(m*a*a);
dp2 = p2/(m*a*a);
}
void DrawFunc() {
double X = obj_q[0][0]; //X,Y is the projected position of the pendulum bob on the xz-plane
double Z = obj_q[0][1];
double a = 2*r/(X*X + Z*Z + 1);
double x = a*X; //x,y,z is the actual position of the pendulum bob
double y = 2*r - a;
double z = a*Z;
draw.rgb(0.1,0.8,0.1);
draw.sphere(x, y, z, 0.05);
draw.rod(x, y, z, 0, r, 0, 0.015);
draw.rgb(0.1,0.1,0.1); draw.rod(x, 0, z, x, -0.01, z, 0.05); //projection onto z-plane
draw.rgb(0.6,0.3,0.6); draw.rod(X, 0.01, Z, X, -0.01, Z, 0.05); //stereographic projection position
draw.rgb(1,0.1,0.1,0.5); draw.rod(X, 0, Z, 0, 2*r, 0, 0.01);
draw.rgb(0.6,0.3,0.6,0.5); draw.sphere(0,r,0,r);
}
void IterFunc() {
double X = obj_q[0][0];
double Z = obj_q[0][1];
double a = 2*r/(X*X + Z*Z + 1);
double x = a*X;
double y = 2*r - a;
double z = a*Z;
draw.track_add(x, y); //display pendulum bob trajectory
draw.trail(x, y, z);
}
double _q_init[] = {1, 0}; //initial position in the stereographic projection plane
double _p_init[] = {0, 0}; //initial momentum is set in main function
void main() {
double dqx = 0; //(dqx,dqy) is the velocity in the stereographic projection plane
double dqy = 1;
double a = 2*r/(_q_init[0]*_q_init[0] + _q_init[1]*_q_init[1] + 1);
_p_init[0] = dqx*m*a*a;
_p_init[1] = dqy*m*a*a;
Z.track = Z.trail = Z.graph3D = 1;
Z.OnDraw = DrawFunc; //draw the pendulum
Z.OnIter = IterFunc; //obtain bob trajectory
Z.H(H,dH,0);
}
Discussion of stereographic projection for Hamiltonian systems
SPC provides a powerful way to derive and simulate Hamiltonian systems associated with spherical and rigid body motion. The spherical pendulum is the simplest SPC system among the example codes provided with Zymplectic. The major advantages and the few disadvantages of SPC can be summarized:- The spherical pendulum in Euler angles can be simulated as a separable system unlike the SPC Hamiltonian that is strictly nonseparable. This means that the SPC simulation requires roughly twice as many evaluations.
- SPC has only one singularity, making it more feasible for simulating spherical systems than Euler angles that generally yield two singularities
- The SPC Hamiltonian of the spherical pendulum is rational unlike the Hamiltonian with Euler angles. This enables exact analytical and rational simulations of the spherical pendulum in phase space
- SPC is considerably more efficient for simulating the spherical pendulum as computationally expensive trigonometric functions are avoided. In fact, Zymplectic simulates the SPC roughly three times faster than the Euler angle spherical pendulum.
- The SPC Hamiltonian has low compactness at the south pole. This means that simulations where the pendulum is generally located near the south pole or just the southern hemisphere, generally produce Hamiltonian errors that are easily an order of magnitude smaller than the same simulation in Euler angles.
- The derivation of the Hamiltonian is generally equally difficult as with other coordinates. While the derivation is simple for the spherical pendulum, the complexity increases greatly for systems with more complicated expressions for the canonical momenta, even when the resulting Hamiltonian may be greatly simplified.